The Conversation (0)
Sort by

Robots from around the world, including this robot from Google, are sharing data on object manipulation to help work towards a general purpose robotic brain.
The generative AI revolution embodied in tools like ChatGPT, Midjourney, and many others is at its core based on a simple formula: Take a very large neural network, train it on a huge dataset scraped from the Web, and then use it to fulfill a broad range of user requests. Large language models (LLMs) can answer questions, write code, and spout poetry, while image-generating systems can create convincing cave paintings or contemporary art.
So why haven’t these amazing AI capabilities translated into the kinds of helpful and broadly useful robots we’ve seen in science fiction? Where are the robots that can clean off the table, fold your laundry, and make you breakfast?
Unfortunately, the highly successful generative AI formula—big models trained on lots of Internet-sourced data—doesn’t easily carry over into robotics, because the Internet is not full of robotic-interaction data in the same way that it’s full of text and images. Robots need robot data to learn from, and this data is typically created slowly and tediously by researchers in laboratory environments for very specific tasks. Despite tremendous progress on robot-learning algorithms, without abundant data we still can’t enable robots to perform real-world tasks (like making breakfast) outside the lab. The most impressive results typically only work in a single laboratory, on a single robot, and often involve only a handful of behaviors.
If the abilities of each robot are limited by the time and effort it takes to manually teach it to perform a new task, what if we were to pool together the experiences of many robots, so a new robot could learn from all of them at once? We decided to give it a try. In 2023, our labs at Google and the University of California, Berkeley came together with 32 other robotics laboratories in North America, Europe, and Asia to undertake the RT-X project, with the goal of assembling data, resources, and code to make general-purpose robots a reality.
Here is what we learned from the first phase of this effort.
Humans are far better at this kind of learning. Our brains can, with a little practice, handle what are essentially changes to our body plan, which happens when we pick up a tool, ride a bicycle, or get in a car. That is, our “embodiment” changes, but our brains adapt. RT-X is aiming for something similar in robots: to enable a single deep neural network to control many different types of robots, a capability called cross-embodiment. The question is whether a deep neural network trained on data from a sufficiently large number of different robots can learn to “drive” all of them—even robots with very different appearances, physical properties, and capabilities. If so, this approach could potentially unlock the power of large datasets for robotic learning.
The scale of this project is very large because it has to be. The RT-X dataset currently contains nearly a million robotic trials for 22 types of robots, including many of the most commonly used robotic arms on the market. The robots in this dataset perform a huge range of behaviors, including picking and placing objects, assembly, and specialized tasks like cable routing. In total, there are about 500 different skills and interactions with thousands of different objects. It’s the largest open-source dataset of real robotic actions in existence.
Surprisingly, we found that our multirobot data could be used with relatively simple machine-learning methods, provided that we follow the recipe of using large neural-network models with large datasets. Leveraging the same kinds of models used in current LLMs like ChatGPT, we were able to train robot-control algorithms that do not require any special features for cross-embodiment. Much like a person can drive a car or ride a bicycle using the same brain, a model trained on the RT-X dataset can simply recognize what kind of robot it’s controlling from what it sees in the robot’s own camera observations. If the robot’s camera sees a UR10 industrial arm, the model sends commands appropriate to a UR10. If the model instead sees a low-cost WidowX hobbyist arm, the model moves it accordingly.
To test the capabilities of our model, five of the laboratories involved in the RT-X collaboration each tested it in a head-to-head comparison against the best control system they had developed independently for their own robot. Each lab’s test involved the tasks it was using for its own research, which included things like picking up and moving objects, opening doors, and routing cables through clips. Remarkably, the single unified model provided improved performance over each laboratory’s own best method, succeeding at the tasks about 50 percent more often on average.
While this result might seem surprising, we found that the RT-X controller could leverage the diverse experiences of other robots to improve robustness in different settings. Even within the same laboratory, every time a robot attempts a task, it finds itself in a slightly different situation, and so drawing on the experiences of other robots in other situations helped the RT-X controller with natural variability and edge cases. Here are a few examples of the range of these tasks:
Encouraged by our success with combining data from many robot types, we next sought to investigate how such data can be incorporated into a system with more in-depth reasoning capabilities. Complex semantic reasoning is hard to learn from robot data alone. While the robot data can provide a range of physical capabilities, more complex tasks like “Move apple between can and orange” also require understanding the semantic relationships between objects in an image, basic common sense, and other symbolic knowledge that is not directly related to the robot’s physical capabilities.
So we decided to add another massive source of data to the mix: Internet-scale image and text data. We used an existing large vision-language model that is already proficient at many tasks that require some understanding of the connection between natural language and images. The model is similar to the ones available to the public such as ChatGPT or Bard. These models are trained to output text in response to prompts containing images, allowing them to solve problems such as visual question-answering, captioning, and other open-ended visual understanding tasks. We discovered that such models can be adapted to robotic control simply by training them to also output robot actions in response to prompts framed as robotic commands (such as “Put the banana on the plate”). We applied this approach to the robotics data from the RT-X collaboration.
To evaluate the combination of Internet-acquired smarts and multirobot data, we tested our RT-X model with Google’s mobile manipulator robot. We gave it our hardest generalization benchmark tests. The robot had to recognize objects and successfully manipulate them, and it also had to respond to complex text commands by making logical inferences that required integrating information from both text and images. The latter is one of the things that make humans such good generalists. Could we give our robots at least a hint of such capabilities?
We conducted two sets of evaluations. As a baseline, we used a model that excluded all of the generalized multirobot RT-X data that didn’t involve Google’s robot. Google’s robot-specific dataset is in fact the largest part of the RT-X dataset, with over 100,000 demonstrations, so the question of whether all the other multirobot data would actually help in this case was very much open. Then we tried again with all that multirobot data included.
In one of the most difficult evaluation scenarios, the Google robot needed to accomplish a task that involved reasoning about spatial relations (“Move apple between can and orange”); in another task it had to solve rudimentary math problems (“Place an object on top of a paper with the solution to ‘2+3’”). These challenges were meant to test the crucial capabilities of reasoning and drawing conclusions.
In this case, the reasoning capabilities (such as the meaning of “between” and “on top of”) came from the Web-scale data included in the training of the vision-language model, while the ability to ground the reasoning outputs in robotic behaviors—commands that actually moved the robot arm in the right direction—came from training on cross-embodiment robot data from RT-X. An example of an evaluation where we asked the robot to perform a task not included in its training data is shown in the video below.
Even without specific training, this Google research robot is able to follow the instruction “move apple between can and orange.” This capability is enabled by RT-X, a large robotic manipulation dataset and the first step towards a general robotic brain.
While these tasks are rudimentary for humans, they present a major challenge for general-purpose robots. Without robotic demonstration data that clearly illustrates concepts like “between,” “near,” and “on top of,” even a system trained on data from many different robots would not be able to figure out what these commands mean. By integrating Web-scale knowledge from the vision-language model, our complete system was able to solve such tasks, deriving the semantic concepts (in this case, spatial relations) from Internet-scale training, and the physical behaviors (picking up and moving objects) from multirobot RT-X data. To our surprise, we found that the inclusion of the multirobot data improved the Google robot’s ability to generalize to such tasks by a factor of three. This result suggests that not only was the multirobot RT-X data useful for acquiring a variety of physical skills, it could also help to better connect such skills to the semantic and symbolic knowledge in vision-language models. These connections give the robot a degree of common sense, which could one day enable robots to understand the meaning of complex and nuanced user commands like “Bring me my breakfast” while carrying out the actions to make it happen.
The RT-X project shows what is possible when the robot-learning community acts together. Because of this cross-institutional effort, we were able to put together a diverse robotic dataset and carry out comprehensive multirobot evaluations that wouldn’t be possible at any single institution. Since the robotics community can’t rely on scraping the Internet for training data, we need to create that data ourselves. We hope that more researchers will contribute their data to the RT-X database and join this collaborative effort. We also hope to provide tools, models, and infrastructure to support cross-embodiment research. We plan to go beyond sharing data across labs, and we hope that RT-X will grow into a collaborative effort to develop data standards, reusable models, and new techniques and algorithms.
Our early results hint at how large cross-embodiment robotics models could transform the field. Much as large language models have mastered a wide range of language-based tasks, in the future we might use the same foundation model as the basis for many real-world robotic tasks. Perhaps new robotic skills could be enabled by fine-tuning or even prompting a pretrained foundation model. In a similar way to how you can prompt ChatGPT to tell a story without first training it on that particular story, you could ask a robot to write “Happy Birthday” on a cake without having to tell it how to use a piping bag or what handwritten text looks like. Of course, much more research is needed for these models to take on that kind of general capability, as our experiments have focused on single arms with two-finger grippers doing simple manipulation tasks.
As more labs engage in cross-embodiment research, we hope to further push the frontier on what is possible with a single neural network that can control many robots. These advances might include adding diverse simulated data from generated environments, handling robots with different numbers of arms or fingers, using different sensor suites (such as depth cameras and tactile sensing), and even combining manipulation and locomotion behaviors. RT-X has opened the door for such work, but the most exciting technical developments are still ahead.
This is just the beginning. We hope that with this first step, we can together create the future of robotics: where general robotic brains can power any robot, benefiting from data shared by all robots around the world.
This article appears in the February 2024 print issue as “The Global Project to Make a General Robotic Brain.”
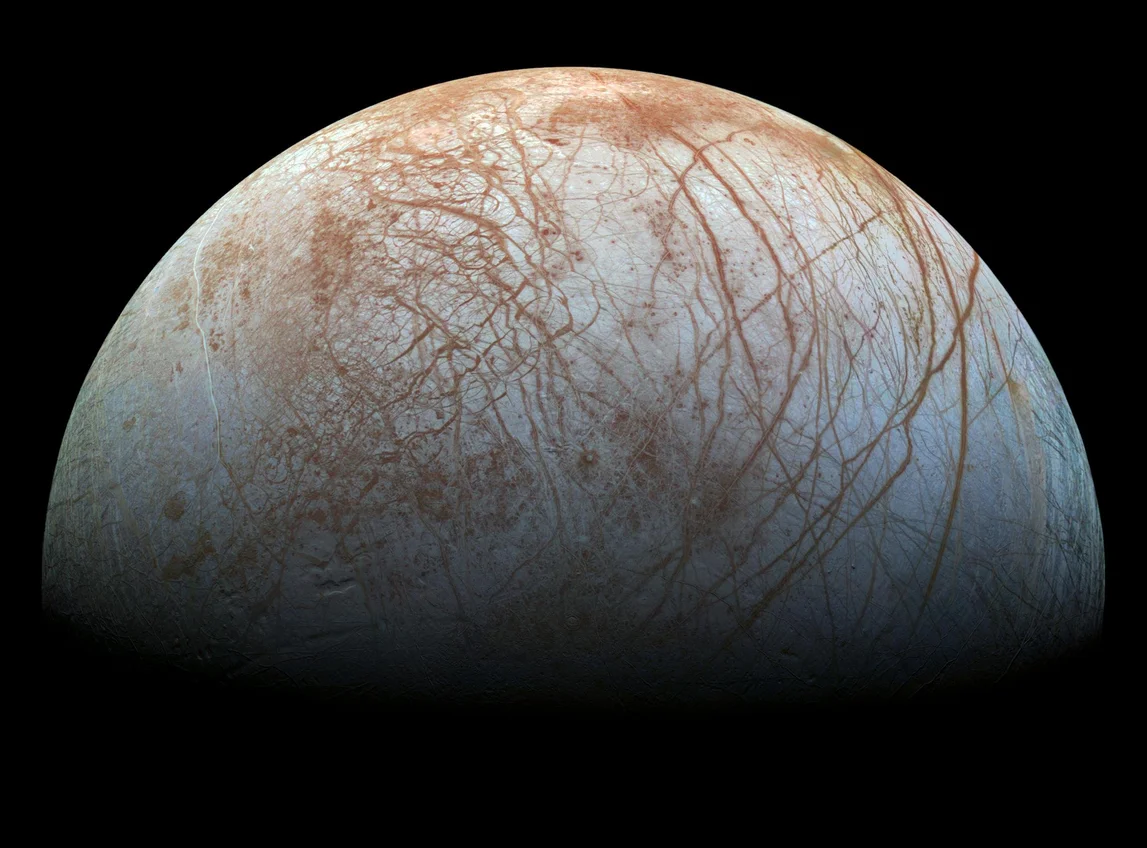
Europa, one of Jupiter's many moons, may be home to extraterrestrial life in subsurface oceans.
“If you think about the existence or the development of life, you always think of water, which is why finding water is of big interest to the to the astronomical community,” says Michael Stelzig, a PhD candidate at the Friedrich Alexander-Universität Erlangen-Nürnberg (FAU) in Germany who co-led the study.
For these reasons, scientists are keen to explore under the surface of our solar system’s icy moons, which are home to subglacial bodies of water. Several space missions have done flybys of Jupiter’s and Saturn’s icy moons, such as the Cassini mission and the upcoming JUICE mission, which is slated to reach Jupiter and its moons in 2031.
However, these missions can only provide preliminary evidence—through remote sensing–that extraterrestrial life is possible on these moons. For true confirmation, a future space mission will need to bring a lander that’s capable of drilling into ice to obtain a subglacial sample.
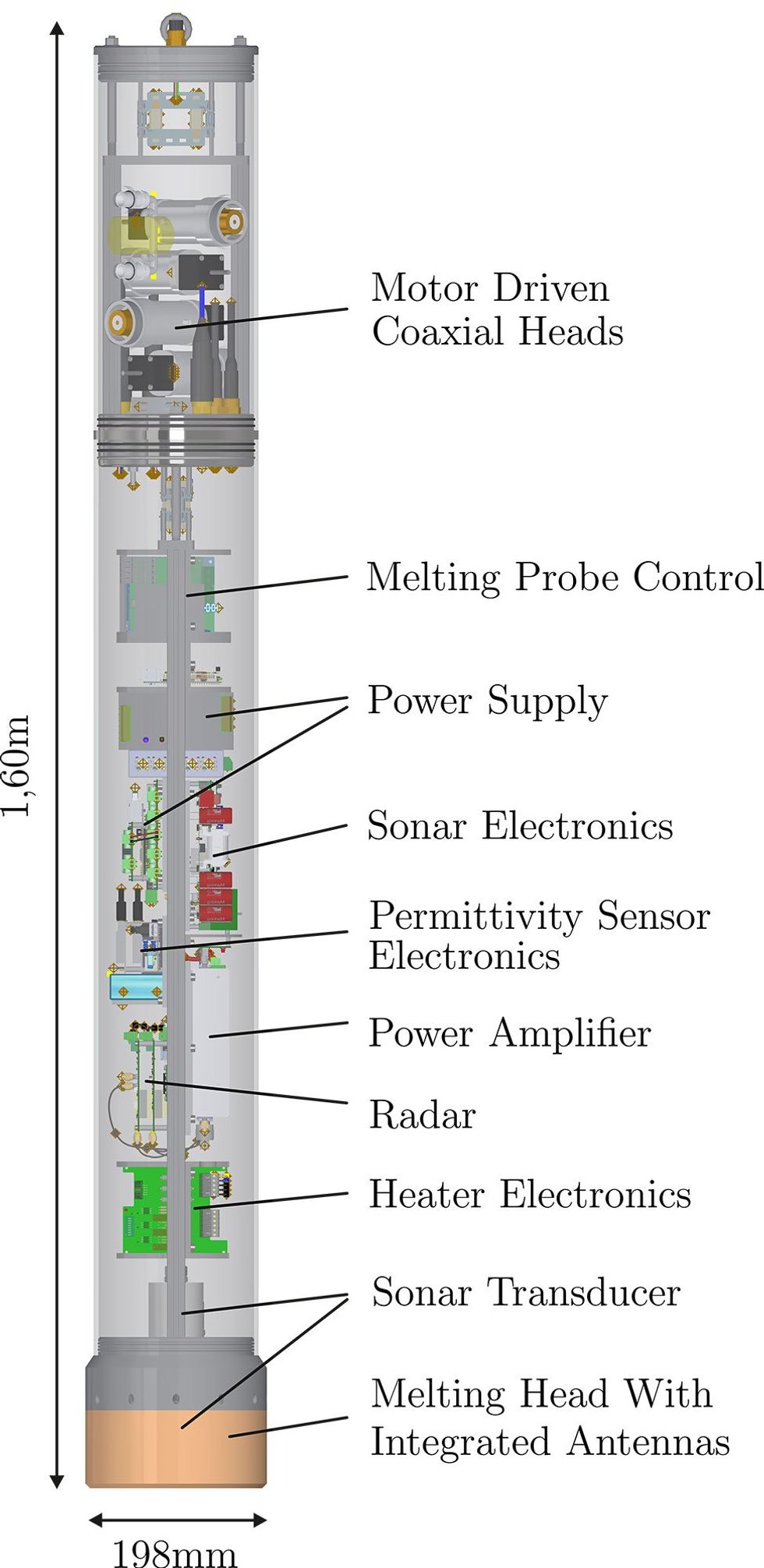 This diagram of the subglacial probe shows its melting head as well as its suite of sensors.Michael Stelzig/FAU
This diagram of the subglacial probe shows its melting head as well as its suite of sensors.Michael Stelzig/FAU
Importantly, as the probe drills down, it must avoid obstacles and debris, such as crevasses or meteorites embedded in the ice, as well as determine the distance to its target. To address this issue, Stelzig’s team has designed a novel melting probe, as part of the German Space Agency’s Technologies for Rapid Ice Penetration and subglacial Lake Exploration (TRIPLE) project line.
“[The probe] is basically a metal torpedo—a drilling system—that can melt into the ice,” explains Stelzig. “But we need that drilling system to be able to see its surroundings.”
This prompted Stelzig and his colleagues to create a sensing system within their melting probe that uses both radar and sonar, each of which has advantages and disadvantages when it comes to exploring subglacial environments.
Radar is great for detecting changes in density, but its signal incurs significant losses in wet snow and ice. In contrast, sonar is great for sensing in wet environments, but the signal can lose efficiency if the system is not coupled well enough to the ice. By combining the two technologies, the researchers hope to harness the advantages of each sensing technique. The system also incorporates a permittivity sensor, which will help ensure accurate radar range gauging and gather scientific data about the ice body.
A major challenge, however, is fitting all this tech into the head of the probe, which is limited in size. Therefore, the researchers created antennas based on a special ceramic that aids in miniaturization. Thanks to the ceramic’s extremely high thermal conductivity, the antenna array in the melting head assists in both directing the radar signals and maintaining the probe’s ability to rapidly melt through the ice.
The researchers put their melting probe to the test on the surface of the Jungfraufirn glacier in Switzerland. Tests of the probe’s sonar, radar, and conductivity sensing capabilities showed proof of concept that the system works. The maximum melting speed the probe achieved was 1.88 meters per hour, with an average of 1.32 m/h over a 4-hour period.
While these preliminary findings are exciting, a lot more work needs to be done before this melting probe makes its debut on the surface of any faraway icy moon.
Stelzig says next steps include further improvements to ensure that the technology is ready for a mission, enhancing the probe’s melting speed, and integrating the probe into the overall TRIPLE system. And, of course, a new mission would need to be announced. Two likely lunar destinations for future missions are Jupiter’s Europa or Saturn’s Enceladus.
The results from the JUICE mission might influence a future mission with a lander and probe, like the one designed by Stelzig’s team. “If JUICE can successfully prove that Europa is habitable, then the TRIPLE system will be something that could be [used in] a future mission, which then actually tries to find life on Europa or Enceladus,” says Stelzig.
 The research team tested their probe design at a camp on the Jungfraufirn glacier in Switzerland.Niklas Haberberger/FAU Erlangen
The research team tested their probe design at a camp on the Jungfraufirn glacier in Switzerland.Niklas Haberberger/FAU Erlangen
But before this technology is rocketing through space for Europa, Enceladus or any other icy moon, more tests will need to be done on Earth.
Jan Audeh is a PhD candidate who was also involved in the study. He notes that, once more research is done to refine the probe, his team is interested in traveling to Antarctica to conduct additional tests.
“In a region [of the Antarctica], we think that there’s ice thickness of about four kilometers, and beneath this thick ice layer, there’s a subglacial lake. This would be a great testing environment for our TRIPLE scenario,” says Audeh.
Along with the sensing system, the probe is designed to release a small, autonomous vehicle that probes the subglacial reservoir and can further investigate points of interest, such as hydro-thermal vents.
Stelzig notes that this probe could be used to not only study icy moons around faraway planets, but also understand our own planet better, for example by improving scientists’ understanding of how global ice reserves are being impacted by climate change.

A team of researchers and physicians led by Prof. S. Farokh Atashzar at NYU Tandon is working to change the way we view healthcare with intelligent, interactive robotic and AI-driven assistive machines that can augment human capabilities and break human barriers.
Atashzar’s work is dedicated to developing intelligent, interactive robotic, and AI-driven assistive machines that can augment human sensorimotor capabilities and allow our healthcare system to go beyond natural competences and overcome physiological and pathological barriers.
Stroke is the leading cause of age-related motor disabilities and is becoming more prevalent in younger populations as well. But while there is a burgeoning marketplace for rehabilitation devices that claim to accelerate recovery, including robotic rehabilitation systems, recommendations for how and when to use them are based mostly on subjective evaluation of the sensorimotor capacities of patients in need.
Atashzar is working in collaboration with John-Ross Rizzo, associate professor of Biomedical Engineering at NYU Tandon and Ilse Melamid Associate Professor of rehabilitation medicine at the NYU School of Medicine and Dr. Ramin Bighamian from the U.S. Food and Drug Administration to design a regulatory science tool (RST) based on data from biomarkers in order to improve the review processes for such devices and how best to use them. The team is designing and validating a robust recovery biomarker enabling a first-ever stroke rehabilitation RST based on exchanges between regions of the central and peripheral nervous systems.
 S. Farokh Atashzar is an Assistant Professor of Electrical and Computer Engineering and Mechanical and Aerospace Engineering at New York University Tandon School of Engineering. He is also a member of NYU WIRELESS, a consortium of researchers dedicated to the next generation of wireless technology, as well as the Center for Urban Science and Progress (CUSP), a center of researchers dedicated to all things related to the future of modern urban life, and directs the MERIIT Lab at NYU Tandon.NYU Tandon
S. Farokh Atashzar is an Assistant Professor of Electrical and Computer Engineering and Mechanical and Aerospace Engineering at New York University Tandon School of Engineering. He is also a member of NYU WIRELESS, a consortium of researchers dedicated to the next generation of wireless technology, as well as the Center for Urban Science and Progress (CUSP), a center of researchers dedicated to all things related to the future of modern urban life, and directs the MERIIT Lab at NYU Tandon.NYU Tandon
In addition, Atashzar is collaborating with Smita Rao, PT, the inaugural Robert S. Salant Endowed Associate Professor of Physical Therapy. Together, they aim to identify AI-driven computational biomarkers for motor control and musculoskeletal damage and to decode the hidden complex synergistic patterns of degraded muscle activation using data collected from surface electromyography (sEMG) and high-density sEMG. In the past few years, this collaborative effort has been exploring the fascinating world of “Nonlinear Functional Muscle Networks” — a new computational window (rooted in Shannon’s information theory) into human motor control and mobility. This synergistic network orchestrates the “music of mobility,” harmonizing the synchrony between muscles to facilitate fluid movement.
But rehabilitation is only one of the research thrusts at MERIIT lab. If you can prevent strokes from happening or reoccurring, you can head off the problem before it happens. For Atashzar, a big clue could be where you least expect it: in your retina.
Atashzar along with NYU Abu Dhabi Assistant Professor Farah Shamout, are working on a project they call “EyeScore,” an AI-powered technology that uses non-invasive scans of the retina to predict the recurrence of stroke in patients. They use optical coherence tomography — a scan of the back of the retina — and track changes over time using advanced deep learning models. The retina, attached directly to the brain through the optic nerve, can be used as a physiological window for changes in the brain itself.
Atashzar and Shamout are currently formulating their hybrid AI model, pinpointing the exact changes that can predict a stroke and recurrence of strokes. The outcome will be able to analyze these images and flag potentially troublesome developments. And since the scans are already in use in optometrist offices, this life-saving technology could be in the hands of medical professionals sooner than expected.
Atashzar is utilizing AI algorithms for uses beyond stroke. Like many researchers, his gaze was drawn to the largest medical event in recent history: COVID-19. In the throes of the COVID-19 pandemic, the very bedrock of global healthcare delivery was shaken. COVID-19 patients, susceptible to swift and severe deterioration, presented a serious problem for caregivers.
Especially in the pandemic’s early days, when our grasp of the virus was tenuous at best, predicting patient outcomes posed a formidable challenge. The merest tweaks in admission protocols held the power to dramatically shift patient fates, underscoring the need for vigilant monitoring. As healthcare systems groaned under the pandemic’s weight and contagion fears loomed, outpatient and nursing center residents were steered toward remote symptom tracking via telemedicine. This cautious approach sought to spare them unnecessary hospital exposure, allowing in-person visits only for those in the throes of grave symptoms.
But while much of the pandemic’s research spotlight fell on diagnosing COVID-19, this study took a different avenue: predicting patient deterioration in the future. Existing studies often juggled an array of data inputs, from complex imaging to lab results, but failed to harness data’s temporal aspects. Enter this research, which prioritized simplicity and scalability, leaning on data easily gathered not only within medical walls but also in the comfort of patients’ homes with the use of simple wearables.
S. Farokh Atashzar and colleagues at NYU Tandon are using deep neural network models to assess COVID data and try to predict patient deterioration in the future.
Atashzar, along with his Co-PI of the project Yao Wang, Professor of Biomedical Engineering and Electrical and Computer Engineering at NYU Tandon, used a novel deep neural network model to assess COVID data, leveraging time series data on just three vital signs to foresee COVID-19 patient deterioration for some 37,000 patients. The ultimate prize? A streamlined predictive model capable of aiding clinical decision-making for a wide spectrum of patients. Oxygen levels, heartbeats, and temperatures formed the trio of vital signs under scrutiny, a choice propelled by the ubiquity of wearable tech like smartwatches. A calculated exclusion of certain signs, like blood pressure, followed, due to their incompatibility with these wearables.
The researchers utilized real-world data from NYU Langone Health’s archives spanning January 2020 to September 2022 lent authenticity. Predicting deterioration within timeframes of 3 to 24 hours, the model analyzed vital sign data from the preceding 24 hours. This crystal ball aimed to forecast outcomes ranging from in-hospital mortality to intensive care unit admissions or intubations.
“In a situation where a hospital is overloaded, getting a CT scan for every single patient would be very difficult or impossible, especially in remote areas when the healthcare system is overstretched,” says Atashzar. “So we are minimizing the need for data, while at the same time, maximizing the accuracy for prediction. And that can help with creating better healthcare access in remote areas and in areas with limited healthcare.”
In addition to addressing the pandemic at the micro level (individuals), Atashzar and his team are also working on algorithmic solutions that can assist the healthcare system at the meso and macro level. In another effort related to COVID-19, Atashzar and his team are developing novel probabilistic models that can better predict the spread of disease when taking into account the effects of vaccination and mutation of the virus. Their efforts go beyond the classic small-scale models that were previously used for small epidemics. They are working on these large-scale complex models in order to help governments better prepare for pandemics and mitigate rapid disease spread. Atashzar is drawing inspiration from his active work with control algorithms used in complex networks of robotic systems. His team is now utilizing similar techniques to develop new algorithmic tools for controlling spread in the networked dynamic models of human society.
 A state-of-the-art human-machine interface module with wearable controller is one of many multi-modal technologies tested in S. Farokh Atashzar’s MERIIT Lab at NYU Tandon.NYU Tandon
A state-of-the-art human-machine interface module with wearable controller is one of many multi-modal technologies tested in S. Farokh Atashzar’s MERIIT Lab at NYU Tandon.NYU Tandon
These projects represent only a fraction of Atashzar’s work. In the MERIIT lab, he and his students build cyber-physical systems that augment the functionality of the next-generation medical robotic systems. They delve into haptics and robotics for a wide range of medical applications. Examples include telesurgery and telerobotic rehabilitation, which are built upon the capabilities of next-generation telecommunications. The team is specifically interested in the application of 5G-based tactile internet in medical robotics.
Recently, he received a donation from the Intuitive Foundation: a Da Vinci research kit. This state-of-the-art surgical system will allow his team to explore ways for a surgeon in one location to operate on a patient in another—whether they are in a different city, region, or even continent. While several researchers have investigated this vision in the past decade, Atashzar is specifically concentrating on connecting the power of the surgeon’s mind with the autonomy of surgical robots - promoting discussions on ways to share the surgical autonomy between the intelligence of machines and the mind of surgeons. This approach aims to reduce mental fatigue and cognitive load on surgeons while reintroducing the sense of haptics lost in traditional surgical robotic systems.
 Atashzar poses with NYU Tandon’s Da Vinci research kit. This state-of-the-art surgical system will allow his team to explore ways for a surgeon in one location to operate on a patient in another—whether they are in a different city, region, or even continent.NYU Tandon
Atashzar poses with NYU Tandon’s Da Vinci research kit. This state-of-the-art surgical system will allow his team to explore ways for a surgeon in one location to operate on a patient in another—whether they are in a different city, region, or even continent.NYU Tandon
In a related line of research, the MERIIT lab is also focusing on cutting-edge human-machine interface technologies that enable neuro-to-device capabilities. These technologies have direct applications in exoskeletal devices, next-generation prosthetics, rehabilitation robots, and possibly the upcoming wave of augmented reality systems in our smart and connected society. One common significant challenge of such systems which is focused by the team is predicting the intended actions of the human users through processing signals generated by functional behavior of motor neurons.
By solving this challenge using advanced AI modules in real-time, the team can decode a user’s motor intentions and predict the intended gestures for controlling robots and virtual reality systems in an agile and robust manner. Some practical challenges include ensuring the generalizability, scalability, and robustness of these AI-driven solutions, given the variability of human neurophysiology and heavy reliance of classic models on data. Powered by such predictive models, the team is advancing the complex control of human-centric machines and robots. They are also crafting algorithms that take into account human physiology and biomechanics. This requires conducting transdisciplinary solutions bridging AI and nonlinear control theories.
Atashzar’s work dovetails perfectly with the work of other researchers at NYU Tandon, which prizes interdisciplinary work without the silos of traditional departments.
“Dr. Atashzar shines brightly in the realm of haptics for telerobotic medical procedures, positioning him as a rising star in his research community,” says Katsuo Kurabayashi, the new chair of the Mechanical and Aerospace Engineering department at NYU Tandon. “His pioneering research carries the exciting potential to revolutionize rehabilitation therapy, facilitate the diagnosis of neuromuscular diseases, and elevate the field of surgery. This holds the key to ushering in a new era of sophisticated remote human-machine interactions and leveraging machine learning-driven sensor signal interpretations.”
This commitment to human health, through the embrace of new advances in biosignals, robotics, and rehabilitation, is at the heart of Atashzar’s enduring work, and his unconventional approaches to age-old problem make him a perfect example of the approach to engineering embraced at NYU Tandon.

IEEE Member Chanwoo Kim helped develop speech recognition, text-to-speech tools, and language modeling systems used on a Samsung Galaxy mobile phone and Google Home devices.
He recently left Samsung to continue his work in the field at Korea University, in Seoul, leading the school’s speech and language processing laboratory. A professor of artificial intelligence, he says he is passionate about teaching the next generation of tech leaders.
“I’m excited to have my own lab at the school and to guide students in research,” he says.
When Amazon announced in 2014 it was developing smart speakers with AI assistive technology, a gadget now known as Echo, Google decided to develop its own version. Kim saw a role for his expertise in the endeavor—he has a Ph.D. in language and information technology from Carnegie Mellon, and he specialized in robust speech recognition. Friends of his who were working on such projects at Google in Mountain View, Calif., encouraged him to apply for a software engineering job there. He left Microsoft in Seattle where he had worked for three years as a software development engineer and speech scientist.
After joining Google’s acoustic modeling team in 2013, he worked to ensure the company’s AI assistive technology, used in Google Home products, could perform in the presence of background noise.
Employer
Korea University in Seoul
Title
Director of the the speech and language processing lab and professor of artificial intelligence
Member grade
Member
Alma maters
Seoul National University; Carnegie Mellon
He led an effort to improve Google Home’s speech-recognition algorithms, including the use of acoustic modeling, which allows a device to interpret the relationship between speech and phonemes (phonetic units in languages).
“When people used the speech-recognition function on their mobile phones, they were only standing about 1 meter away from the device at most,” he says. “For the speaker, my team and I had to make sure it understood the user when they were talking farther away.”
Kim proposed using large-scale data augmentation that simulates far-field speech data to enhance the device’s speech-recognition capabilities. Data augmentation analyzes training data received and artificially generates additional training data to improve recognition accuracy.
His contributions enabled the company to release its first Google Home product, a smart speaker, in 2016.
“That was a really rewarding experience,” he says.
That same year, Kim moved up to senior software engineer and continued improving the algorithms used by Google Home for large-scale data augmentation. He also further developed technologies to reduce the time and computing power used by the neural network and to improve multi-microphone beamforming for far-field speech recognition.
Kim, who grew up in South Korea, missed his family, and in 2018 he moved back, joining Samsung as vice president of its AI Center in Seoul.
When he joined Samsung, he aimed to develop end-to-end speech recognition and text-to-speech recognition engines for the company’s products, focusing on on-device processing. To help him reach his goals, he founded a speech processing lab and led a team of researchers developing neural networks to replace the conventional speech-recognition systems then used by Samsung’s AI devices.
“The most rewarding part of my work is helping to develop technologies that my friends and family members use and enjoy.”
Those systems included an acoustic model, a language model, a pronunciation model, a weighted finite state transducer, and an inverse text normalizer. The language model looks at the relationship between the words being spoken by the user, while the pronunciation model acts as a dictionary. The inverse text normalizer, most often used by text-to-speech tools on phones, converts speech into written expressions.
Because the components were bulky, it was not possible to develop an accurate, on-device speech-recognition system using conventional technology, Kim says. An end-to-end neural network would complete all the tasks and “greatly simplify speech-recognition systems,” he says.
 Chanwoo Kim [top row, seventh from the right] with some of the members of his speech processing lab at Samsung Research.Chanwoo Kim
Chanwoo Kim [top row, seventh from the right] with some of the members of his speech processing lab at Samsung Research.Chanwoo Kim
He and his team used a streaming attention-based approach to develop their model. An input sequence—the spoken words—are encoded, then decoded into a target sequence with the help of a context vector, a numeric representation of words generated by a pretrained deep learning model for machine translation.
The model was commercialized in 2019 and is now part of Samsung’s Galaxy phone. That same year, a cloud version of the system was commercialized and is used by the phone’s virtual assistant, Bixby.
Kim’s team continued to improve speech recognition and text-to-speech systems in other products, and every year they commercialized a new engine.
They include the power-normalized cepstral coefficients, which improve the accuracy of speech recognition in environments with disturbances such as additive noise, changes in the signal, multiple speakers, and reverberation. It suppresses the effects of background noise by using statistics to estimate characteristics. It is now used in a variety of Samsung products including air conditioners, cellphones, and robotic vacuum cleaners.
Samsung promoted Kim in 2021 to executive vice president of its six Global AI Centers, located in Cambridge, England; Montreal; Seoul; Silicon Valley; New York; and Toronto.
In that role he oversaw research on incorporating artificial intelligence and machine learning into Samsung products. He is the youngest person to be an executive vice president at the company.
He also led the development of Samsung’s generative large language models, which evolved in Samsung Gauss. The suite of generative AI models can generate code, images, and text.
In March he left the company to join Korea University as a professor of artificial intelligence—which is a dream come true, he says.
“When I first started my doctoral work, my dream was to pursue a career in academia,” Kim says. “But after earning my Ph.D., I found myself drawn to the impact my research could have on real products, so I decided to go into industry.”
He says he was excited to join Korea University, as “it has a strong presence in artificial intelligence” and is one of the top universities in the country.
Kim says his research will focus on generative speech models, multimodal processing, and integrating generative speech with language models.
Kim’s father was an electrical engineer, and from a young age, Kim wanted to follow in his footsteps, he says. He attended a science-focused high school in Seoul to get a head start in learning engineering topics and programming. He earned his bachelor’s and master’s degrees in electrical engineering from Seoul National University in 1998 and 2001, respectively.
Kim long had hoped to earn a doctoral degree from a U.S. university because he felt it would give him more opportunities.
And that’s exactly what he did. He left for Pittsburgh in 2005 to pursue a Ph.D. in language and information technology at Carnegie Mellon.
“I decided to major in speech recognition because I was interested in raising the standard of quality,” he says. “I also liked that the field is multifaceted, and I could work on hardware or software and easily shift focus from real-time signal processing to image signal processing or another sector of the field.”
Kim did his doctoral work under the guidance of IEEE Life Fellow Richard Stern, who probably is best known for his theoretical work in how the human brain compares sound coming from each ear to judge where the sound is coming from.
“At that time, I wanted to improve the accuracy of automatic speech recognition systems in noisy environments or when there were multiple speakers,” he says. He developed several signal processing algorithms that used mathematical representations created from information about how humans process auditory information.
Kim earned his Ph.D. in 2010 and joined Microsoft in Seattle as a software development engineer and speech scientist. He worked at Microsoft for three years before joining Google.
Kim joined IEEE when he was a doctoral student so he could present his research papers at IEEE conferences. In 2016 a paper he wrote with Stern was published in the IEEE/ACM Transactions on Audio, Speech, and Language Processing. It won them the 2019 IEEE Signal Processing Society’s Best Paper Award. Kim felt honored, he says, to receive this “prestigious award.”
Kim maintains his IEEE membership partly because, he says, IEEE is a trustworthy source of information, and he can access the latest technical information.
Another benefit of membership is IEEE’s global network, Kim says.
“By being a member, I have the opportunity to meet other engineers in my field,” he says.
He is a regular attendee at the annual IEEE Conference for Acoustics, Speech, and Signal Processing. This year he is the technical program committee’s vice chair for the meeting, which is scheduled for next month in Seoul.



RB-WATCHER‘s intelligence lies not only in its ability to navigate autonomously but also in its suite of intelligent functions. Whether detecting human presence, monitoring a designated area or identifying intruders, collecting crucial data or identifying potential fire outbreaks, RB-WATCHER’s advanced algorithms and sensors ensure unparalleled precision. This mobile robot autonomously performs a wide range of surveillance tasks with exceptional accuracy.
Surveillance and security tasks demand utmost precision and reliability to detect, prevent and overcome potential hazards and risks. RB-WATCHER has been meticulously engineered to meet these requirements, delivering unparalleled performance in diverse operating environments.
RB-WATCHER: Autonomous Mobile Robot for Surveillance & Security youtu.be
This surveillance and security robot stands out for its autonomous capabilities, allowing it to operate efficiently even in challenging and dynamic environments. Equipped with state-of-the-art inspection and navigation sensorization, this robotic platform combines multiple technologies to ensure seamless performance. Among its impressive array of sensors are the bi-spectral camera, front camera, RTK GPS and microphone, all working in harmony to provide comprehensive surveillance coverage. Let’s take a deeper look at specifications the RB-WATCHER enjoys.
Standing out among its competitors, RB-WATCHER‘s inspection sensors play a pivotal role in its surveillance capabilities. The bi-spectral Pan-Tilt-Zoom camera captures high-resolution images, while the microphone provides real-time audio information, boosting situational awareness and threat detection capabilities.
Connectivity is seamless with RB-WATCHER, as it comes equipped with a 4G router for real-time data transmission. Additionally, optional 5G router and Smart Radio support ensure compatibility with the latest communication technologies, enabling RB-WATCHER to remain at the forefront of connectivity advancements.
Navigation and localization are critical aspects of RB-WATCHER‘s performance. Equipped with a front depth camera, Inertial Measurement Unit (IMU), 3D LIDAR and advanced 3D SLAM and 2D SLAM technologies, RB-WATCHER achieves precise movement and accurate mapping of its surroundings. The integration of Real-Time Kinematic (RTK) GPS further enhances its position awareness, making it an ideal choice for large outdoor spaces.
RB-WATCHER also offers a host of impressive technical specifications that cement its position as an industry leader. With dimensions of 790 x 614 x 856 mm and weighing 62 kg, RB-WATCHER strikes a balance between compactness and power. Its payload capacity of up to 65 kg ensures it can handle various surveillance tasks effectively, while its top speed of 2.5 m/s allows for swift and efficient coverage of designated areas. This versatility makes RB-WATCHER suitable for both indoor and outdoor environments, further expanding its range of applications.
Built to withstand challenging conditions, RB-WATCHER boasts an IP53 enclosure class, offering protection against dust and water spray. Its temperature range of -10ºC to +45ºC enables reliable operation in a wide array of environments. Additionally, the robot’s ability to navigate slopes of up to 80% showcases its exceptional adaptability and ensures comprehensive surveillance coverage.
As a vital component of the service portfolio offered by private security and surveillance companies, one of RB-WATCHER’s core strengths lies in its ability to execute surveillance and security tasks across various industries. The RB-WATCHER provides a powerful solution that enables them to enhance their offerings and benefit their clients in several ways. The autonomous mobile robot excels in patrolling predetermined areas, detecting objects, individuals, and identifying potential fire hazards. Its versatility and reliability make the RB-WATCHER an ideal choice for private security and surveillance companies, empowering them to deliver comprehensive and advanced services to their clients.
When it comes to security and surveillance robots, reliability is non-negotiable. Robotnik’s RB-WATCHER instills confidence through its robust construction and resilient performance. Built to withstand demanding environments, RB-WATCHER operates flawlessly, consistently delivering accurate data for effective decision-making. With this reliable companion by your side, you can rest assured that your surveillance and security tasks are in capable hands.
RB-WATCHER breaks free from the limitations of conventional surveillance methods. With its free navigation capabilities, this collaborative mobile robot efficiently traverses various terrains, overcoming obstacles effortlessly. By dynamically adapting to changing environments, RB-WATCHER guarantees comprehensive surveillance coverage, leaving no stone unturned in its quest for security.
Robotnik’s RB-WATCHER sets a new standard in the realm of security and surveillance robots. By combining precision, reliability and autonomous capabilities, RB-WATCHER redefines the way we approach surveillance tasks in a rapidly changing world. With its impressive sensorization, versatility and intelligent functions, RB-WATCHER stands as a testament to Robotnik’s commitment to innovation and safety. As we continue to embrace technological advancements, RB-WATCHER paves the way for a safer, more secure future.